机器人
引导控制技术
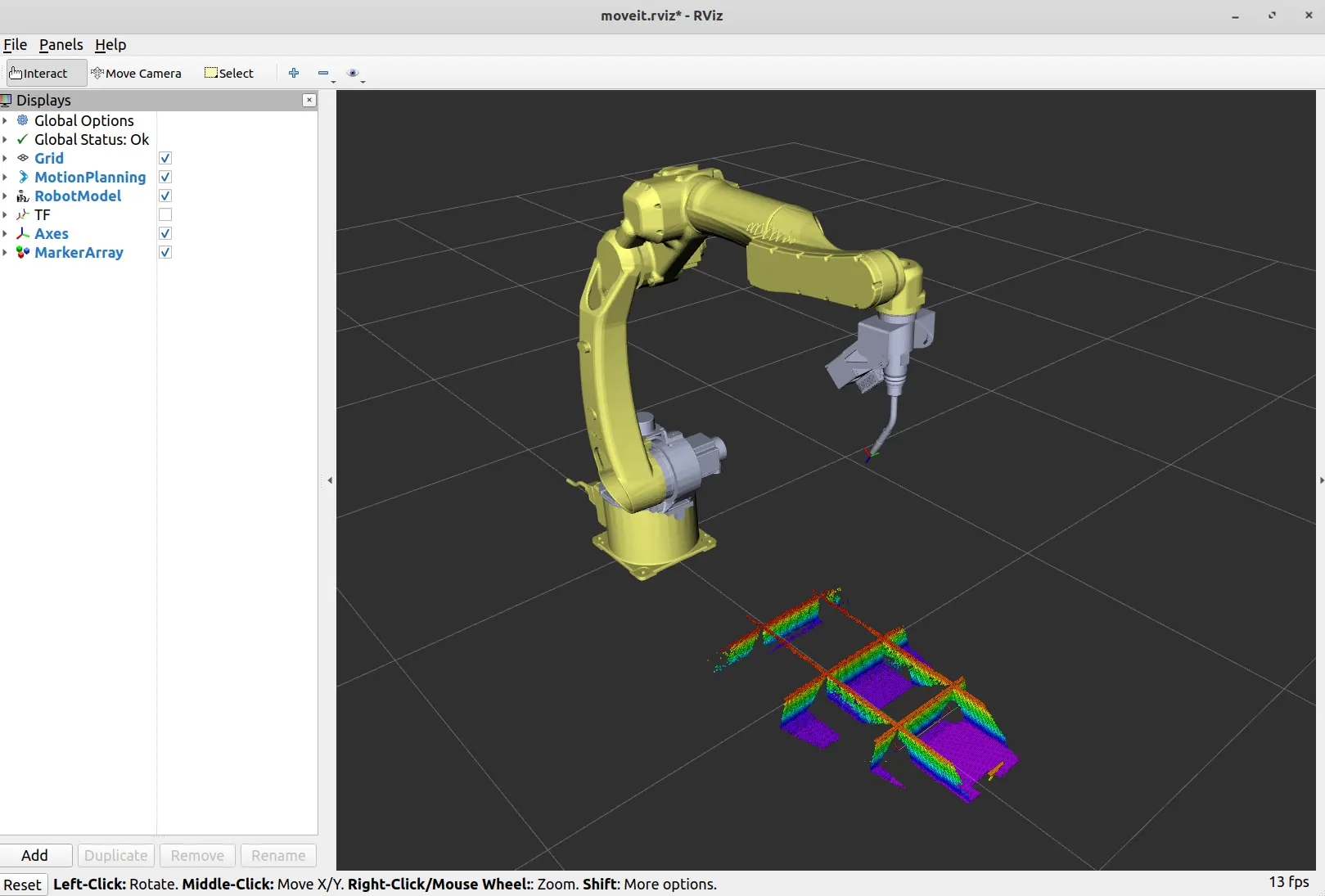
实时3D虚拟场景模拟
机器人运动系统搭载实时 3D 虚拟场景模拟功能,通过高精度三维动画引擎与内嵌运动规划仿真模型的深度协同,构建 1:1 还原的虚拟作业环境。在焊接作业前,系统可基于工件尺寸、机械臂参数等数据,预演焊接轨迹的每一个运动节点,直观呈现机械臂空间姿态与焊枪角度;作业过程中,同步映射实时焊接状态,动态展示电流、速度等参数波动,配合碰撞预警机制,提前规避机械臂与工件、工装的干涉风险。这种 “虚拟先行,现实验证” 的模式,不仅大幅提升轨迹规划效率,更以可视化手段确保运动控制的精准性与安全性。
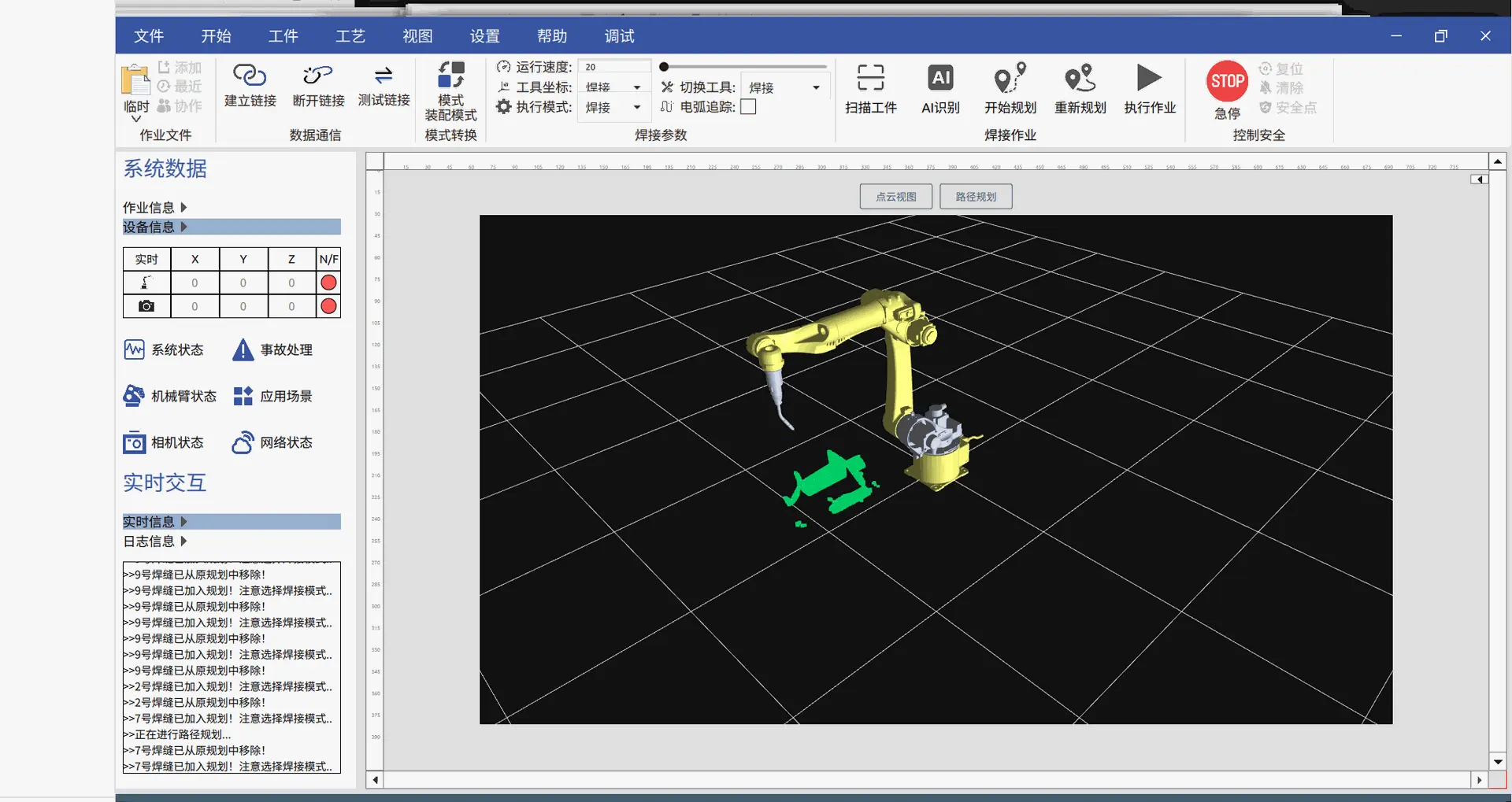
最简化控制流程
我们的机器人运动系统深度聚焦 “最简化控制流程”。采用直观的图形化操作界面,工程师无需复杂编程,即可完成运动轨迹编辑;系统内置智能预设模板,支持一键调用最优运动参数。同时,通过多传感器数据自动融合技术,系统可自主感知作业环境,动态优化运动路径,大幅减少人工调试环节,让复杂运动控制变得高效便捷。
可适配性强
系统自研程度高,拥有开放的通用接口设计,可以适配市面主流工业机器人。可以快速适配龙门,地轨等多种外部设备。 运动控制算法内置多种动力学模型,还是高速运转下的精准定位,均可通过参数调整实现最优适配。此外,系统预留丰富的接口,可无缝对接视觉、力控等外部模块,满足多行业、多场景的差异化运动需求,真正实现 “按需定制,灵活应变” 。
多样化的专属工作模式
为适应多样化的焊接作业环境,系统配备了多套专属工作模式,内置丰富功能模块供用户灵活调配。通过精准匹配场景需求,既能确保焊接质量达到行业高标准,又能有效控制成本支出,在品质与效益之间找到了理想的平衡点。
定制解决方案
客户满意是我们的首要任务。我们的支持团队随时准备为您提供帮助,确保您获得顺利和成功的体验。
质量和卓越
凭借丰富的经验和深厚的行业知识,我们为您提供独到的见解和解决方案。
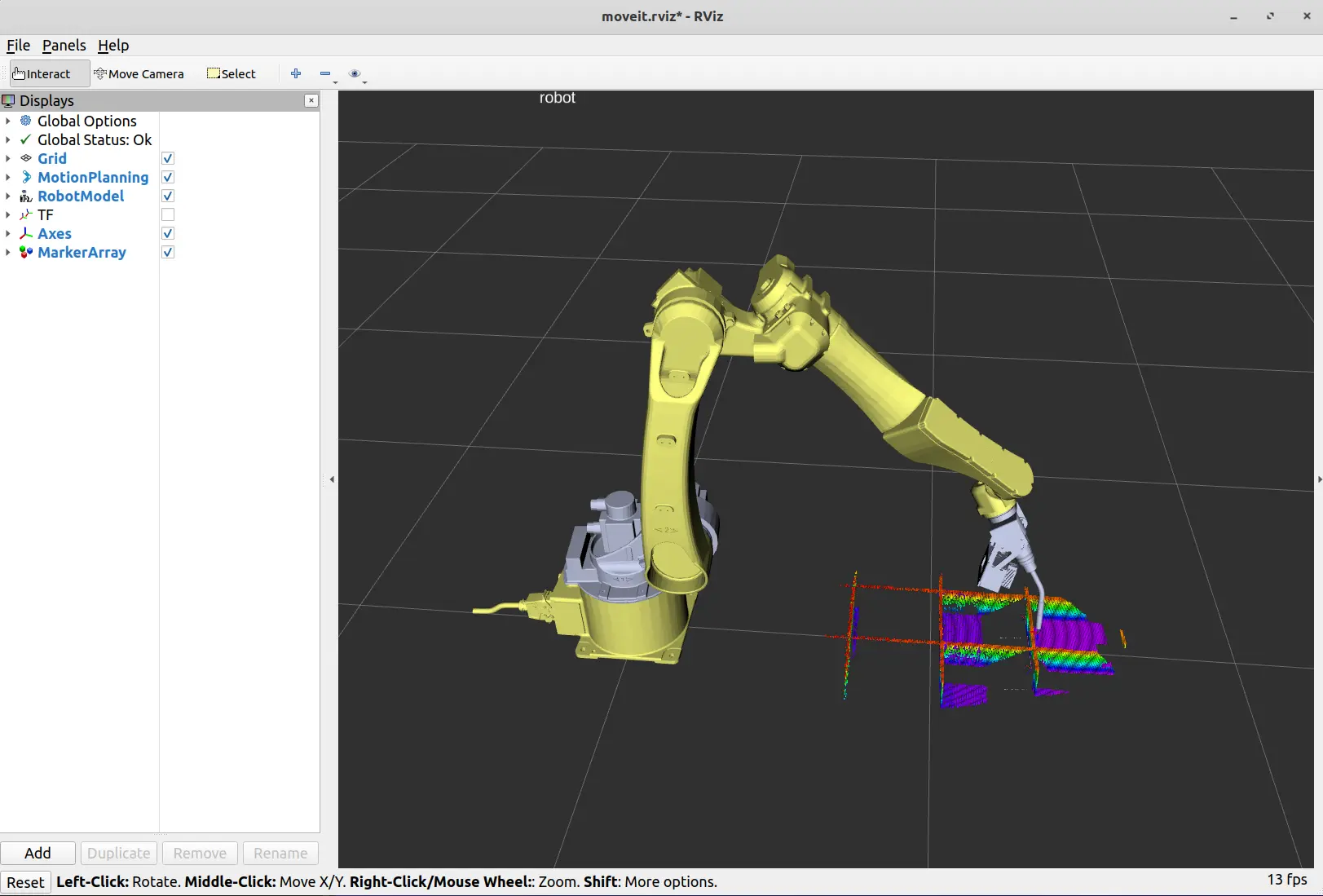
焊缝路径规划与避障
通过自研的仿真验证模块,对算法生成的姿态与数据进行动态仿真和正确性验算